- 東莞市常盈五金有限公司

- 全國服務(wù)熱線
13925799771
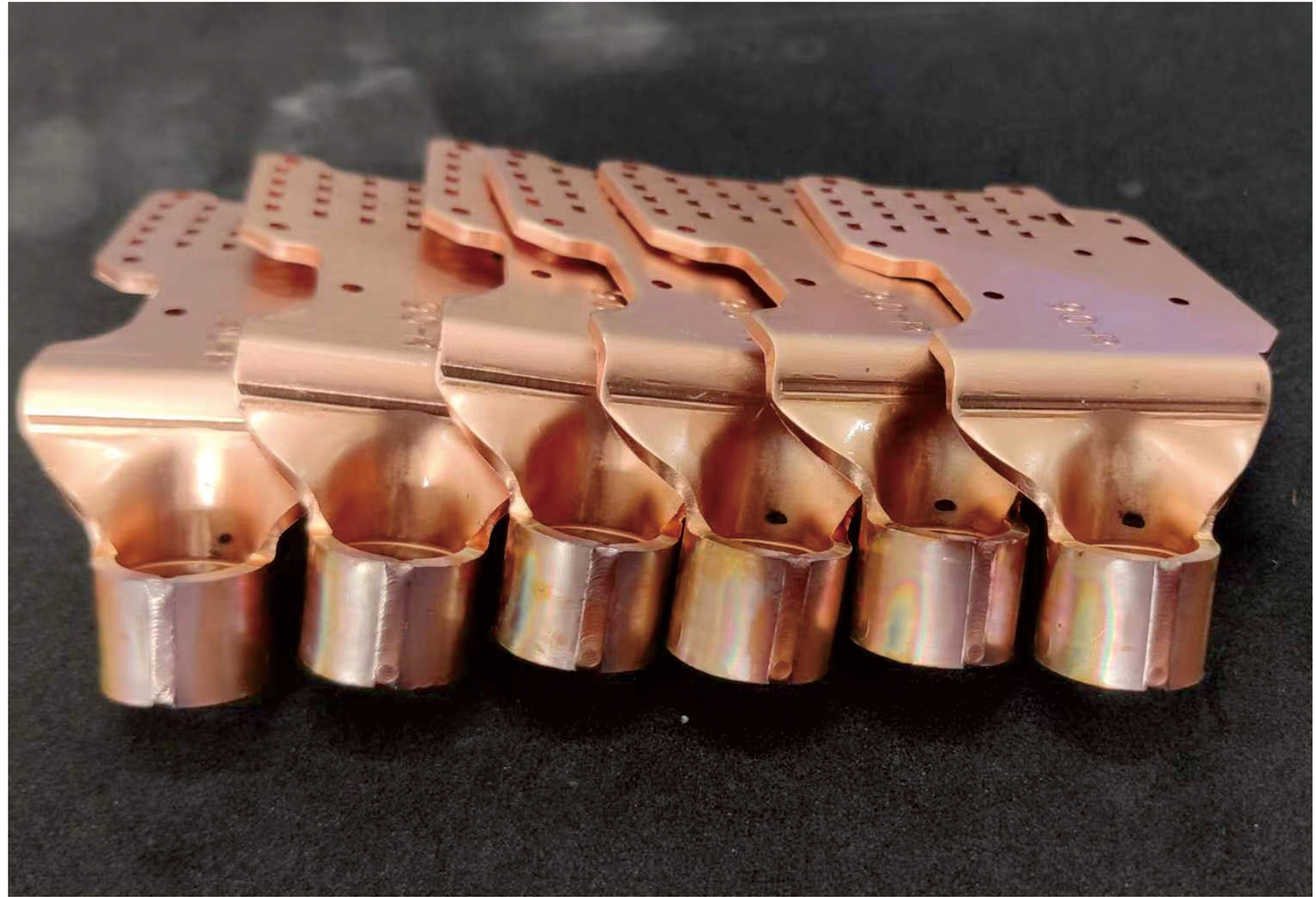
主營紫銅激光焊接加工、鋁合金激光焊接加工、不銹鋼激光焊接加工、鐵制品、鍍鋅板激光焊接加工,有需要?dú)g迎咨詢!
 東莞市常盈五金有限公司
東莞市常盈五金有限公司在激光焊接中,保證間隙誤差的一種方法是通過施加較大壓力來補(bǔ)償工件的形狀誤差。如轎車車身頂縫焊接的夾持系統(tǒng)經(jīng)常使用壓力滾輪或其他工具來夾緊搭接焊縫,一方面防止焊接過程中工件的變形,另一方面可保證焦點與工件表面之間位置的相對恒定。
通常,噴嘴到工件的距離在3~10mm的范圍之間,典型的噴嘴孔直徑在4—8mm之間,一般氣體壓力較低,氣體流速在8~30L/min之間。圖3-30為C02和Nd: YAG激光器應(yīng)用較為廣泛的焊接噴嘴典型形狀。
為了使焊接光學(xué)元件免受焊接中所產(chǎn)生的粉塵污染和飛濺的影響,人們提出了幾種橫向噴射式噴嘴的設(shè)計思想。它們的基本原理都是考慮使氣流垂直穿過激光束,針對不同的技術(shù)要求,或是用于吹散焊接煙塵,或是利用高動能使金屬顆粒轉(zhuǎn)向。3.10 激光焊接加工系統(tǒng)
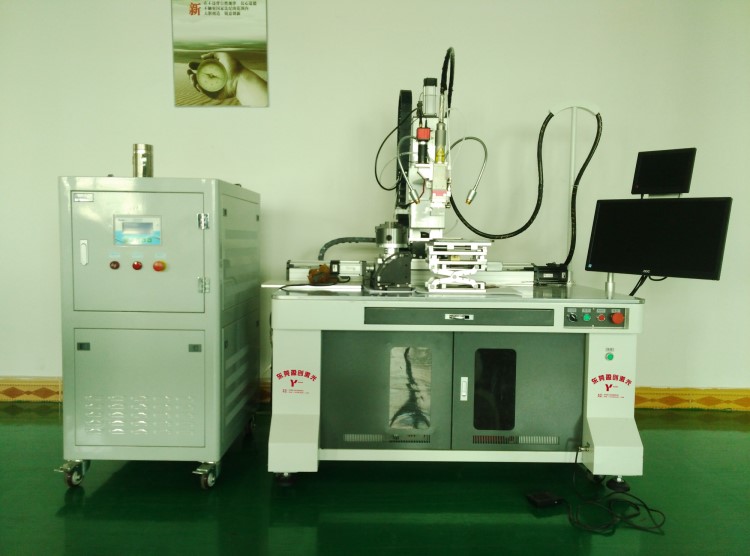
一般激光焊接加工系統(tǒng)主要由以下幾個部分組成:
(1)激光器;
(2)加工機(jī)床或工作臺;
(3)內(nèi)外光路的冷卻系統(tǒng);
(”導(dǎo)光系統(tǒng)及光束聚焦系統(tǒng)(反射鏡、透射鏡及光纖元件等);
(5)工作氣體(包括供氣裝置和噴嘴等);
(6)控制系統(tǒng)及檢測系統(tǒng)(包括控制器、操作系統(tǒng)、數(shù)控軟件及生產(chǎn)技術(shù)軟件等)o
對于激光器和光束引導(dǎo)、聚焦系統(tǒng),前文已有詳細(xì)的介紹,下面將對激光焊接設(shè)備的其他部分進(jìn)行介紹。3.10.1加工系統(tǒng)
加工系統(tǒng)的主要任務(wù)是承載工件并使工件與激光束作相對運(yùn)動,加工精度在很大程度上取決于加工系統(tǒng)的精度和激光束運(yùn)動時的可調(diào)精度。光束運(yùn)動的調(diào)節(jié)和加工系統(tǒng)的運(yùn)動軌跡都是靠敬控系統(tǒng)來控制的。加工系統(tǒng)需要有良好的數(shù)控系統(tǒng)和可靠的檢測、反饋系統(tǒng),才可能生產(chǎn)出精確的產(chǎn)品。加工系統(tǒng)的形式很多,主要有數(shù)控機(jī)床、工作臺及焊接機(jī)器人等。激光器與不同的焊接加工系統(tǒng)相結(jié)合可以大大提高激光焊接的應(yīng)用范圍。
根據(jù)工件和激光加工頭的空間運(yùn)動形式可以將激光焊接加工的運(yùn)動系統(tǒng)分為簡單和復(fù)雜兩種。在簡單的運(yùn)動系統(tǒng)中,材料只能在固定激光束下作線性運(yùn)動或簡單的旋轉(zhuǎn),而在復(fù)雜的多軸運(yùn)動系統(tǒng)則可以進(jìn)行三維軌跡的焊接。下面分別對一維、二維和三維三種運(yùn)動系統(tǒng)進(jìn)行簡單介紹。
1)一維運(yùn)動系統(tǒng)
一維系統(tǒng)是對所有只允許沿著一個方向進(jìn)行加工操作的系統(tǒng)的總稱,例如,管、橫截面或條狀工件的焊接加工。而且,這些系統(tǒng)經(jīng)常在焊接加工頭上安裝額
外的直線調(diào)整機(jī)構(gòu)以精確調(diào)節(jié)焊接位置。
2)二維運(yùn)動系統(tǒng)
二維運(yùn)動系統(tǒng)主要用于加工平板金屬材料,在管與橫截面的加工中應(yīng)用也較多。二維焊接系統(tǒng)主要分為以下三種形式:①固定光束(光束傳輸系統(tǒng)固定);②運(yùn)動光束(工件固定);③混合系統(tǒng)(光軸和工作臺均可運(yùn)動)o每種形式都有各自的優(yōu)缺點,一般來說,固定光束的系統(tǒng)在相同或相似工件的大批量焊接時效率較高。
在二維運(yùn)動系統(tǒng)中,可采用先進(jìn)的飛動元件,其運(yùn)動元件的質(zhì)量較小,光束引導(dǎo)元件的慣性較低(如在飛動光學(xué)系統(tǒng)中的移動式反射鏡),能夠以很高的速度和加速度運(yùn)動,同時還可保證較高的重復(fù)精度和定位精度,這對于復(fù)雜形狀工件的加工特別重要。現(xiàn)代的CNC運(yùn)動系統(tǒng)一般可以獲得較高的加工精度,大多數(shù)情況下,使用傳統(tǒng)的機(jī)器人達(dá)不到這種加工所需的精度。
3)三維運(yùn)動系統(tǒng)
對于三維的焊接加工來說,可使用5軸龍門架系統(tǒng)、機(jī)器人系統(tǒng)或遠(yuǎn)距離焊接系統(tǒng)。
在龍門架系統(tǒng)中,通過3個相互垂直的直線軸來進(jìn)行定位,較常用的是“半飛動光學(xué)系統(tǒng)”o光學(xué)系統(tǒng)沿著兩個軸運(yùn)動,工件固定沿著一個方向運(yùn)動。為了保證激光束以正確的角度入射到工件的表面,龍門架系統(tǒng)一般還備有兩個旋轉(zhuǎn)軸用于激光頭的定位。對于C02激光,其先束傳輸可以采用柔性臂單元,Nd: YAG激光則可通過光纖來進(jìn)行傳輸。
機(jī)器人系統(tǒng)主要用于焊接三維的零部件,如轎車車身。相對于龍門架系統(tǒng),機(jī)器人系統(tǒng)更高效、更經(jīng)濟(jì)。但在使用機(jī)器人系統(tǒng)時,必須事先檢查該系統(tǒng)是否具有所需的加工精度和動特性。機(jī)器人系統(tǒng)有三種運(yùn)動方式:激光器運(yùn)動、光束運(yùn)動和工件運(yùn)動。
遠(yuǎn)距離焊接系統(tǒng)可大幅度提高焊接效率和焊接質(zhì)量,在不久的將來,有望取代目前使用的常規(guī)運(yùn)動系統(tǒng)。遠(yuǎn)距離焊接系統(tǒng)無需光束傳輸運(yùn)動臂,主要是利用光學(xué)鏡片的轉(zhuǎn)動來改變加工位置。對于連續(xù)點焊來說,是一個高速運(yùn)動系統(tǒng),激光束在焊縫之間的運(yùn)動速度可以大于2m/sO采用這種方式,遠(yuǎn)距離焊接將成為電阻點焊的一個有力的競爭對手。一個成功的遠(yuǎn)距離焊接系統(tǒng),需要一個光束質(zhì)量高( >5mm.mrad)的大功率(>3kW)激光器。在長焦距的聚焦系統(tǒng)(f>1.6m)作用下,該系統(tǒng)可以形成一個錐狀的工作范圍,如圖3-31所示,以每分鐘超過100個點的焊接速度焊接轎車車門和其他的幾何形狀o除了焊點外,也可以形成各種形狀的焊縫,例如,階梯形、圓形、半圓形和波紋形等,所有的這些都是通過軟件來控制的。圖3-31 遠(yuǎn)距離激光焊接系統(tǒng)一I:作原理3.10.2控制系統(tǒng)和檢測系統(tǒng)
整個焊接系統(tǒng)應(yīng)采朋-個中央控制器來控制,這樣可以使激光器與運(yùn)動系統(tǒng)相協(xié)調(diào)。控制器要有較高的采樣速率才能有效地處理編碼器信號,以保證運(yùn)動的精度和平穩(wěn)性。為了快速處理信息,控制器還應(yīng)具備預(yù)讀程序信息的能力,以便在保持恒定速率的情況下,焊接方向改變時改變加速度。對于多任務(wù)加-1-過程,焊接系統(tǒng)通常采用ir37機(jī)數(shù)字控制器(CNC),這可使多軸控制更具靈活性。
由-J:實際零件的公差,加上系統(tǒng)本身或加工程序的不精確,許多焊接應(yīng)用中經(jīng)常需要對加.L_頭實際位置相對于程序中定義的路徑進(jìn)行校正。目前已經(jīng)開發(fā)出大量的基于不同傳感技術(shù)的定位控制系統(tǒng),這些定位控制系統(tǒng)主要包括位置傳感器、焊縫檢測傳感器和夾具加I頭。
位氍傳感器主要包括電容式、接觸式及軸式等幾種類型。電容式位置傳感器在J:業(yè)中較為常用,它是通過測量電容的變化來進(jìn)行距離的測量,該電容隨工件表面到噴嘴端部的距離而變化。接觸式位置傳感系統(tǒng)主要用于加工非導(dǎo)電材料,如塑料或木材,在這些系統(tǒng)中,實際距離是通過與工件表面接觸的傳感器來測定的。在許多情況下傳感器按環(huán)形同軸方式被安裝在切割噴嚼的周圍,這種位置傳感器是使用現(xiàn)有加I:系統(tǒng)的軸或通過安裝有切割光學(xué)元件的附加軸來控制。
在激光焊接中,焊前準(zhǔn)備的誤差、坐標(biāo)軸的運(yùn)動偏差、夾緊誤差及夾具的磨損等因素都可能引起定位誤差,甚至?xí)?dǎo)致被焊構(gòu)件的焊縫不完整,而且激光焊。
在線溝通,請點我在線咨詢
咨詢熱線:
13925799771
客服qq:
3284009399